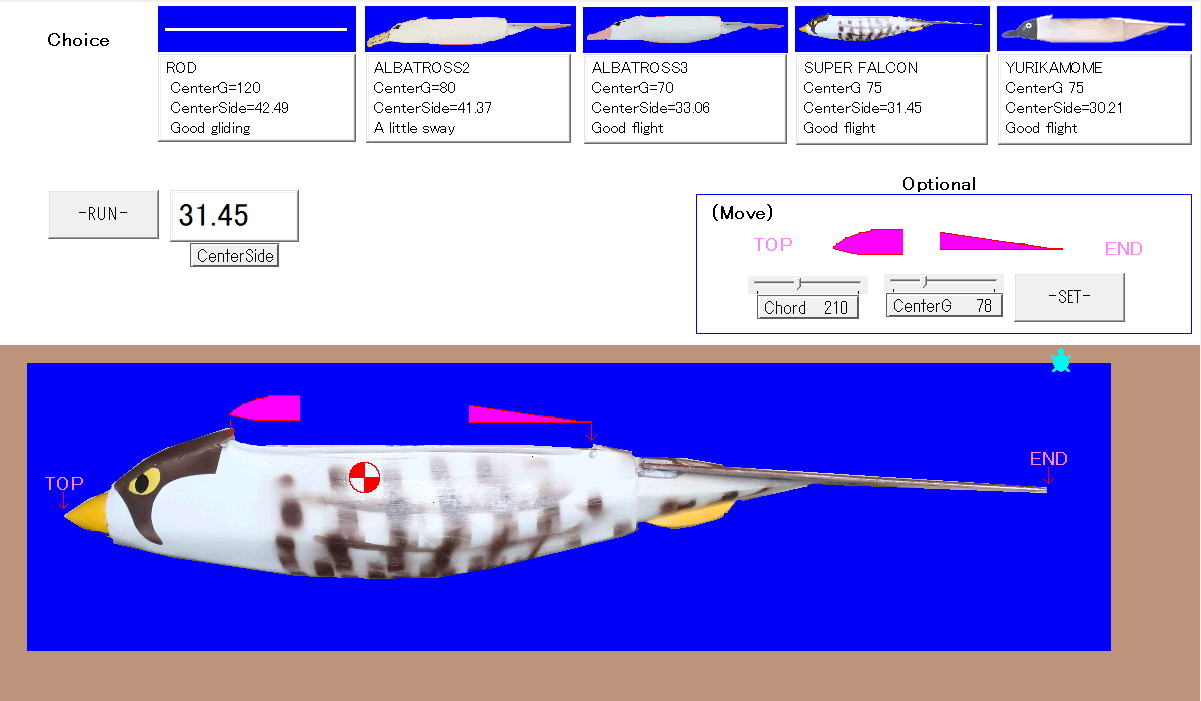
 計算する側面の形をえらびます。 |
| 側面重心計算 側面重心.mwx 垂直尾翼の無い鳥の形をした飛行機の安定性を計算してみよう。 |
計算する側面の形をえらびます。 |
| <なぜ、このプログラムをつくったの?> |
|
|
| <どんなことがわかったか> |
| <プログラミング>側面重心のもと.mwxを左クリックしてはじめる |
| オブジェクト | ||
|
|
| 手順 |
| to startup set "Project "showcc? "false end to chgrod clean make "bak pos setpos [-31 -135] setshape shape + 1 stamp setshape shape - 1 setpos :bak ・TOP、 setpos[-512 -120] 前縁、 setpos[-512 -120] 後縁、 setpos[473 -120] ・END、 setpos[473 -120] setChord 260 setCenterG 120 縮尺 end to chgALBATROSS2 clean make "bak pos setpos [-31 -135] setshape shape + 1 stamp setshape shape - 1 setpos :bak ・TOP、 setpos[-581 -220] 前縁、 setpos[-259 -90] 後縁、 setpos[43 -85] ・END、 setpos[509 -122] setChord 210 setCenterG 80 縮尺 end to chgALBATROSS3 clean make "bak pos setpos [-31 -135] setshape shape + 1 stamp setshape shape - 1 setpos :bak ・TOP、 setpos[-550 -205] 前縁、 setpos[-255 -81] 後縁、 setpos[51 -82] ・END、 setpos[508 -137] setChord 210 setCenterG 70 縮尺 end to setsuperfalcon clean make "bak pos setpos [-31 -135] setshape shape + 1 stamp setshape shape - 1 setpos :bak ・TOP、 setpos[-537 -155] 前縁、 setpos[-370 -82] 後縁、 setpos[-9 -87] ・END、 setpos[448 -131] setChord 210 setCenterG 78 縮尺 end to setgull clean make "bak pos setpos [-31 -155] setshape shape + 1 stamp setshape shape - 1 setpos :bak ・TOP、 setpos[-545 -155] 前縁、 setpos[-275 -82] 後縁、 setpos[50 -87] ・END、 setpos[460 -110] setChord 220 setCenterG 75 縮尺 end to -SET- 縮尺 end to setG setCenterG round Chord * (difference (ask "重心 「xcor」) (ask "前縁 「xcor」)) / (difference (ask "後縁 「xcor」) (ask "前縁 「xcor」)) end to 縮尺 set縮尺率 ((ask "後縁 「xcor」) - (ask "前縁 「xcor」)) / Chord 重心、 setx (ask "前縁 「xcor」) + CenterG * 縮尺率 end to -RUN- ・TOP、 set壁の色 colorunder 開始pos 縮尺 set前モーメント 0 set後モーメント 0 測定1 測定2 setCenterSide (round 10000 * 前モーメント / (前モーメント + 後モーメント)) / 100 終了 end to 測定1 measure、 setpos ask "・TOP [pos] repeat (ask "重心 「xcor」) - (ask "・TOP 「xcor」) + 1 「 sety Y1 高さは 0 repeat Y2 - Y1 - 1 「 forward 1 if not colorunder = 壁の色 「pd setcolor 25 fd 0 pu set前モーメント 前モーメント + (ask "重心 「xcor」) - xcor」 」 setx xcor + 1 」 end to 測定2 measure、 setx ask "重心 「xcor」 sety Y1 repeat (ask "・END 「xcor」) - (ask "重心 「xcor」) + 1 「 sety Y1 set高さ 0 repeat Y2 - Y1 - 1 「 forward 1 if not colorunder = 壁の色 「pd setcolor 85 fd 0 pu set後モーメント 後モーメント + xcor - (ask "重心 「xcor」)」 」 setx xcor + 1 」 end to 開始pos measure、 setpos ask "・TOP 「pos」 setx xcor - 10 青高さ測定1 measure、 setpos ask "・TOP 「pos」 setx xcor - 10 青高さ測定2 end to 青高さ測定1 forward 1 if not colorunder = 壁の色 「setY2 ycor stop」 青高さ測定1 end to 青高さ測定2 back 1 if not colorunder = 壁の色 「setY1 ycor stop」 青高さ測定2 end to 完了 メロディー1 stopall end |
 垂直尾翼の無い鳥の形をしたラジコングライダーは、世界に例が無い。
垂直尾翼の無い鳥の形をしたラジコングライダーは、世界に例が無い。