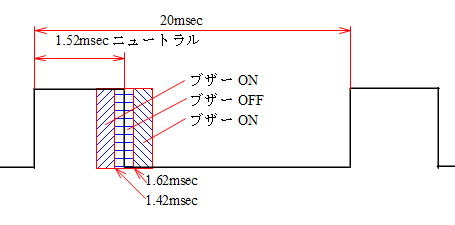
| 草むらに降りたときに発見ブザーがあると便利です。飛行中にトビに追われたとき、着陸を知らせたいときにも尾を上げるか、下げるとブザーを鳴ると便利です。その操作をPICにプログラミングして、100円ショップで買った防犯ブザーから取り出した圧電ブザーを慣らします。 |
| 1.使う部品 |
 |
マイクロコンピュータ PIC12F683 |
 |
ソケット |
 |
ダイオード E102 |
 |
コンデンサー 0.1μF |
 |
抵抗器 10kΩ |
 |
トランジスタ 2SC1815Y |
 |
電子ブザー(または、防犯ブザーから取り出した圧電ブザーでも良い) |
| 2.防犯ブザーから圧電ブザーを取り出す |
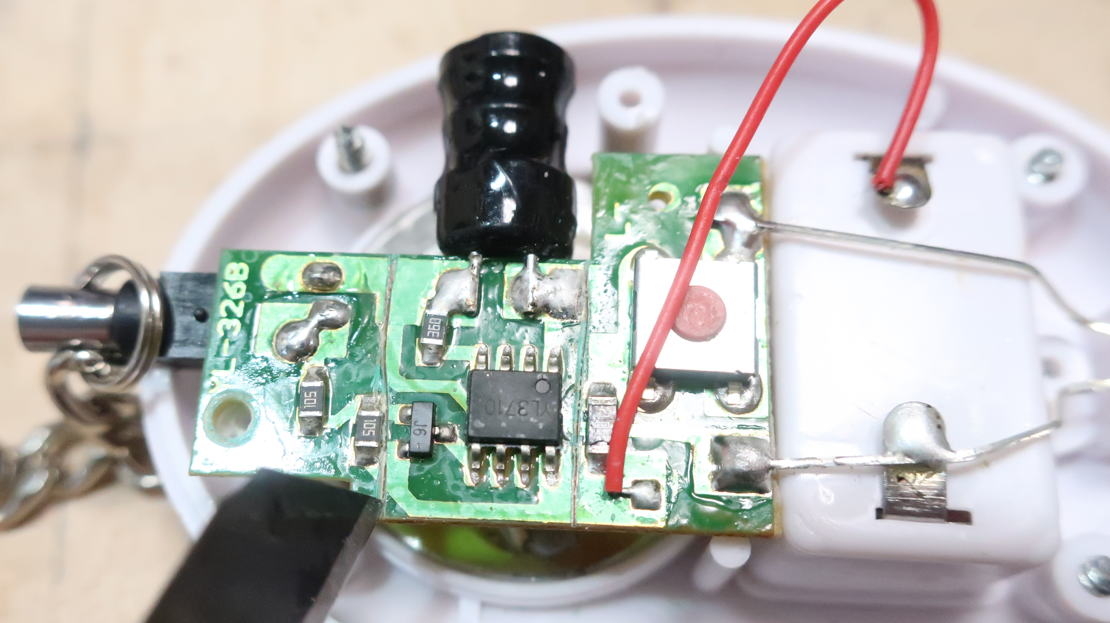 |
 発信器と圧電ブザーを使います。 発信器の+と-にPICの回路をつなぎます。 |
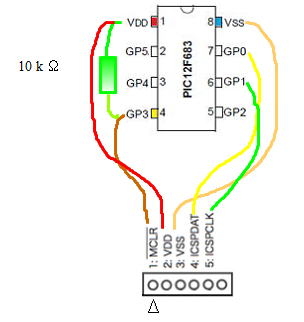
| 3.配線 |
| PICがブザーを鳴らす回路を作ります。 |
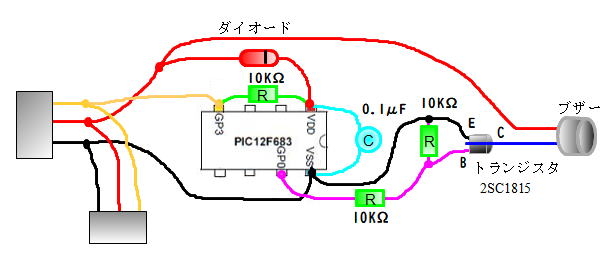 |
ダイオード、コンデンサー、抵抗、トランジスタ、ブザー、PICソケットを使います。 全部で150円程度です。 |
| <抵抗R1> マイコンの出力電圧 = 5V ベースエミッタ間飽和電圧 = 1.0V ベース電流 = 負荷の電流 ÷ 直流電流増幅率 = 30mA ÷ 200 = 0.15 mA (2倍して0.3mA) 抵抗R1 = (マイコンの出力電圧 - ベースエミッタ間飽和電圧) ÷ ベース電流 = ( 5V - 1.0V ) ÷ 0.3mA = 10 kΩ |
|
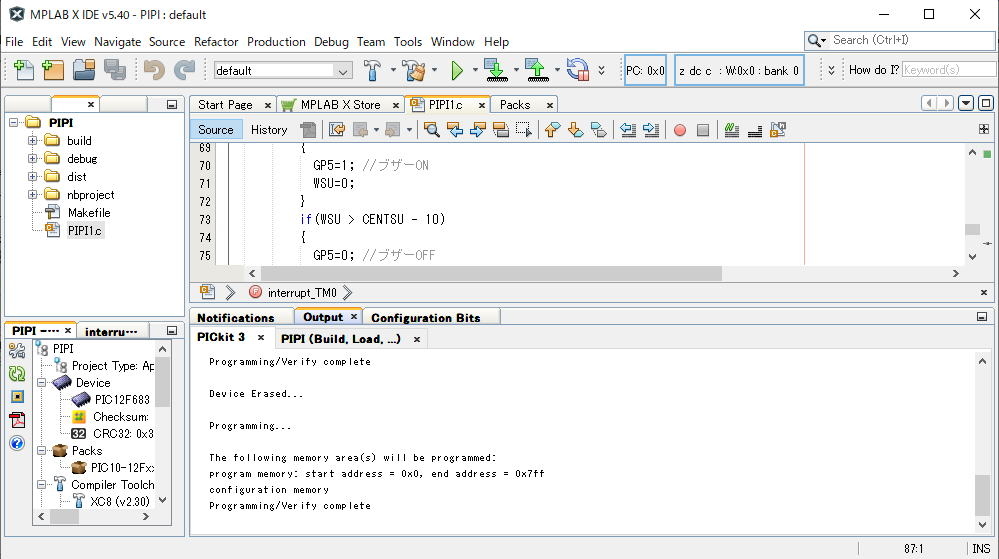
| プログラムを書き込んだPICをソケットに挿したら、完成です。 動作を確かめ、問題があったら、プログラミングからやり直します。100回ほど書き直しができます。 |
 電子ブザーを使った発見ブザー |
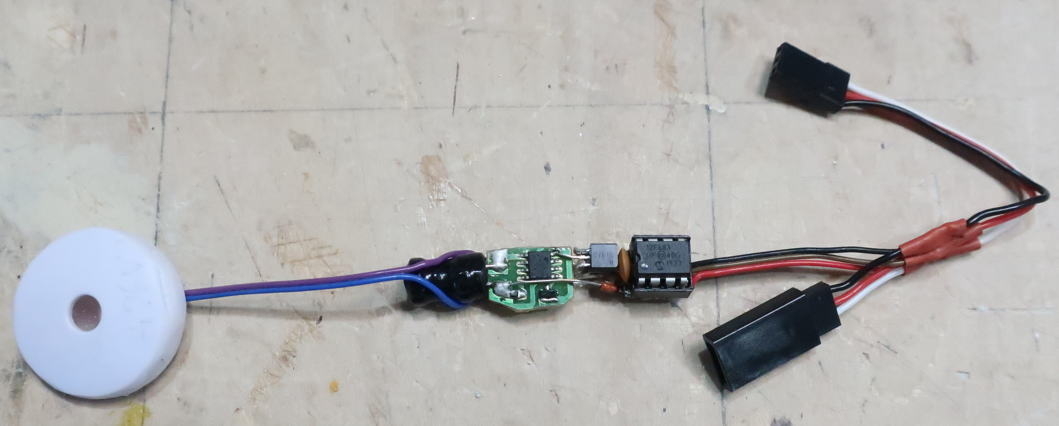 圧電ブザーを使った発見ブザー |
| 4.プログラミングの準備 (費用:5000円程度) |
| PICを使うために必要な物です。 | ||||||||||||||||||||
|


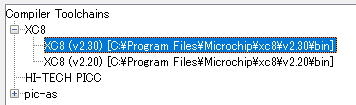
| 5.プログラミングソフトをセットアップする | |||||||||
|


 インストールの途中でMPLABと統合をする。
インストールの途中でMPLABと統合をする。
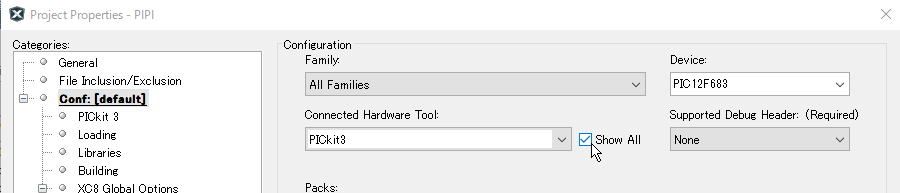
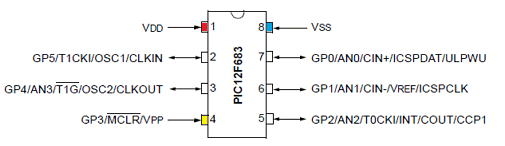 VDDは、電源+、VSSは、電源-
VDDは、電源+、VSSは、電源-
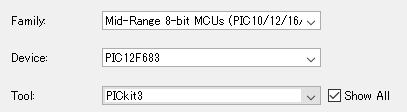
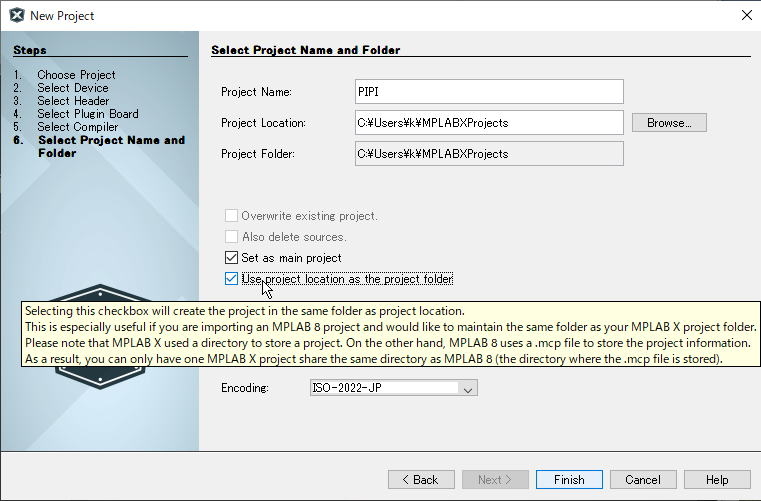
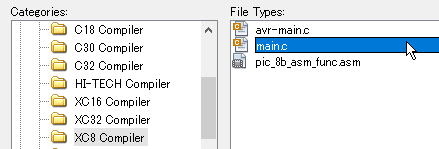
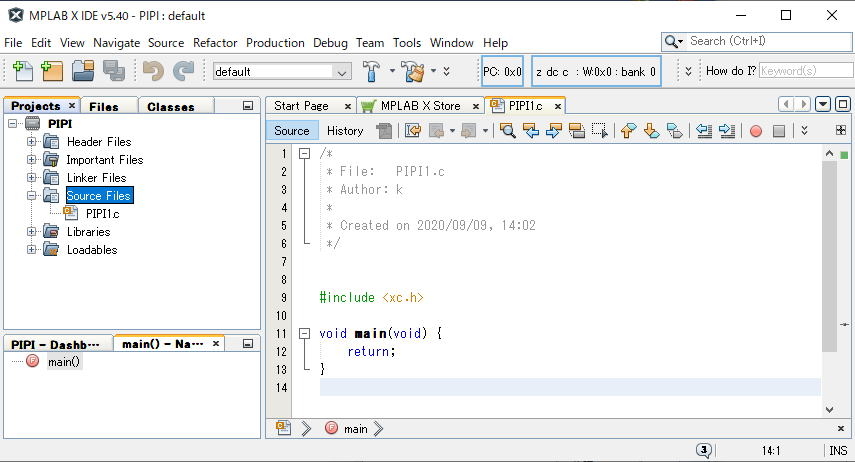
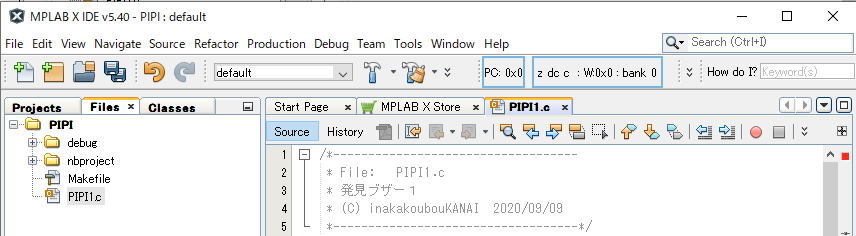
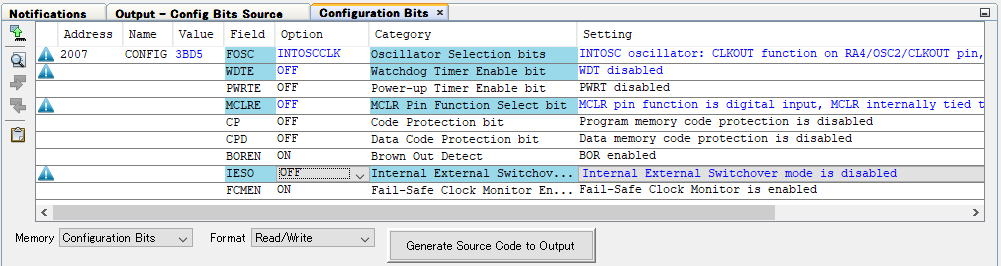
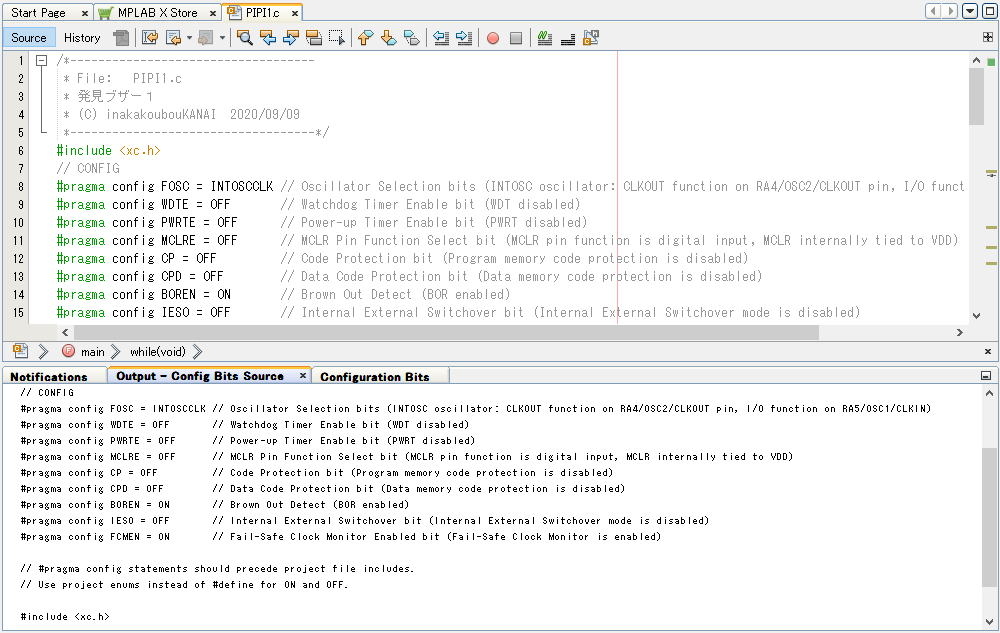
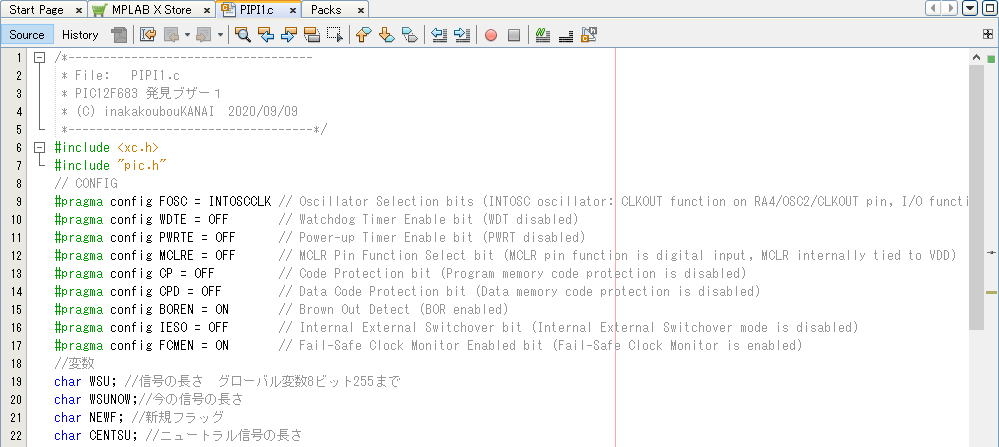
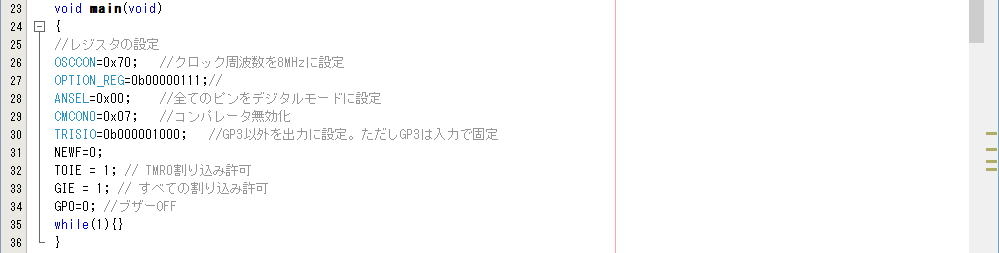
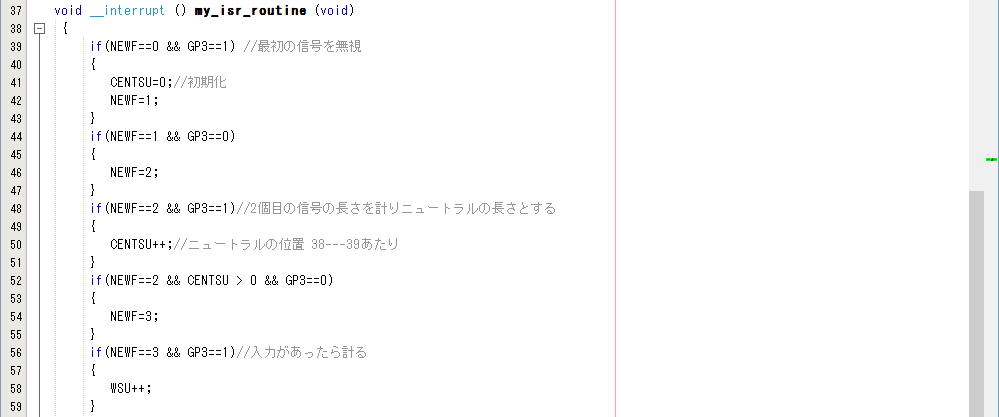
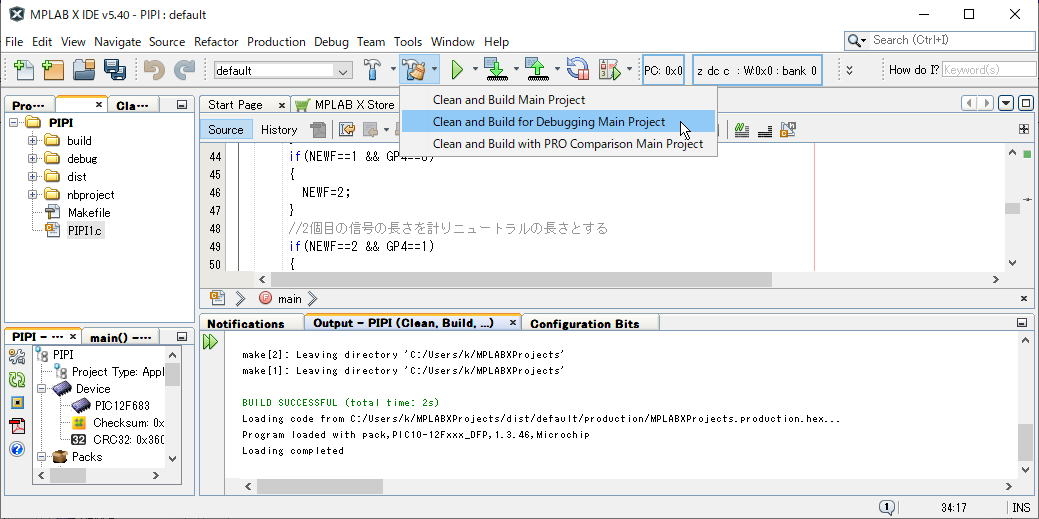
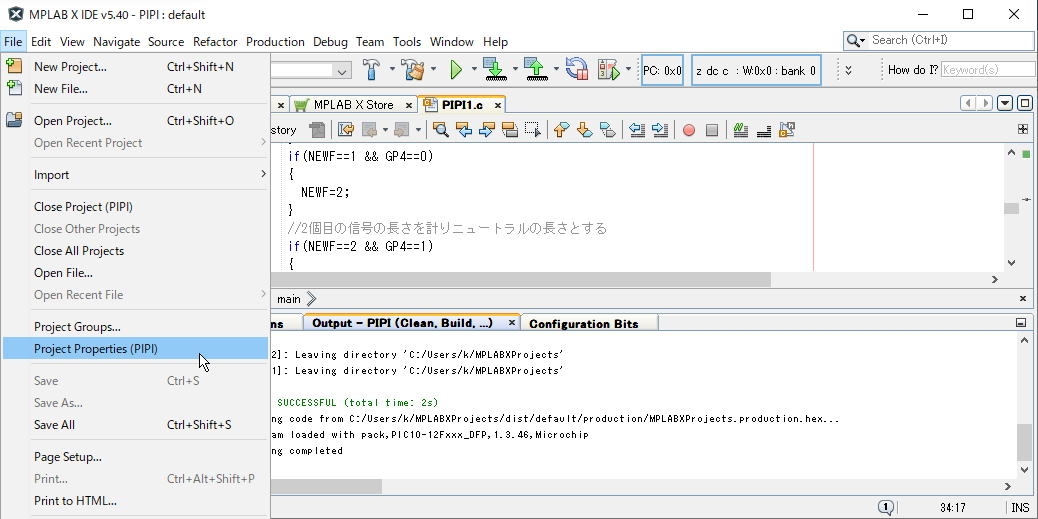
 C言語でプログラミングするには、MPLAB X IDE を起動して、以下の手順で行います。
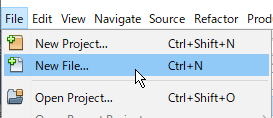
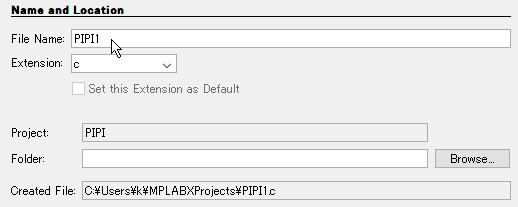
C言語でプログラミングするには、MPLAB X IDE を起動して、以下の手順で行います。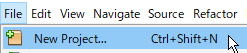 File → New Project を選択
File → New Project を選択 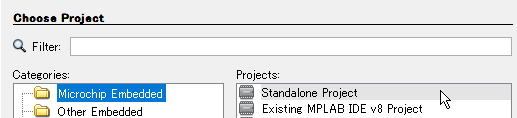





.gif)